By stretching the thorax and abdomen of my honey bee model, I can mimic other species.
Recently, several other projects that I work on took the center stage and the honey bee project has been temporarily shelved. I reached a good pace with the overall design, and even printed and assembled a very early rough draft of the exoskeleton. I have not built any fasteners or linkages except in the legs, so I assembled the exoskeleton by gluing linen strips between the bones. This worked surprisingly well and with some improvements in technique and practice, could be a fun way to assemble my printed insects.

Freeze frame from the 15 second ad I produced along with the design of the butterfly.
Teaching robotics and insect physiology to kids has become an alluring prospect, and I got a chance to remotely instruct a class at The Kidzeum. I designed a robotic butterfly contraption and created video instructional footage as well as live video conferencing with the class. It was successful in that every kid walked away with a functioning butterfly they personally created and decorated, but I did not have any time to actually teach them electronics or much about butterflies. The whole three hours was a little long for them, but we needed every minute to get through the project. I started discussions with the museum about doing the class again next year, or developing a kit from the parts. I am also wondering if I could teach adults more complex robotics courses.
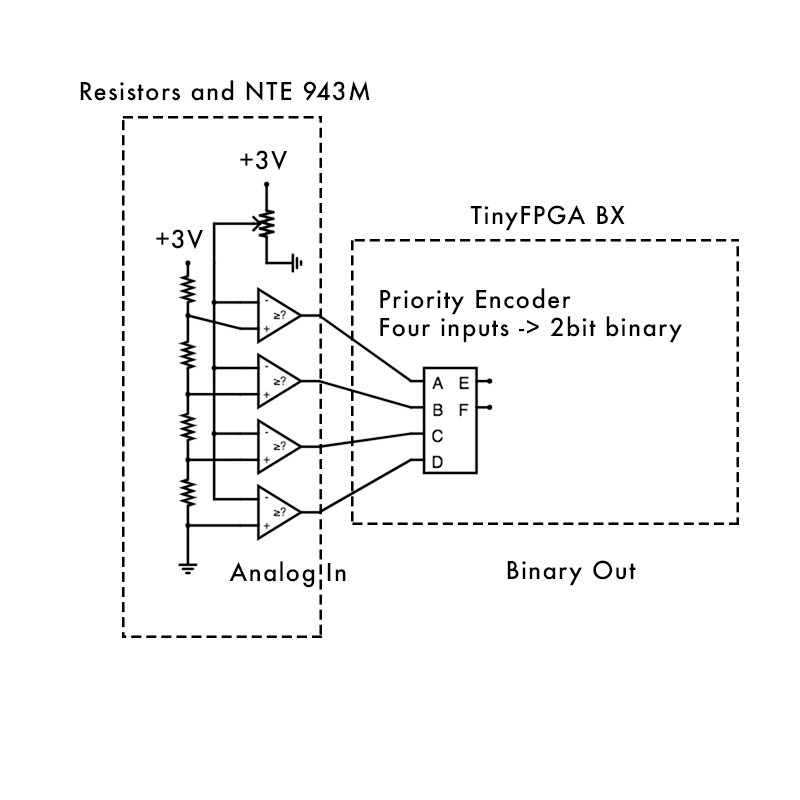
Two bit flash ADC for FPGA implementation. Uses four comparators with reference voltages.
I also got my TinyFPGA BX board back up and running. The discourse community was able to provide the necessary instructions to get the metadata issues ignored and the board useable. I also purchased Verilog By Example by Blaine C. Readler as well as working through examples on FPGA4fun.com. I was able to create a tune box, servo sweep, LED PWM output, and just finished a priority encoder connected to the LED PWM so I could use 8 comparators to build a simple 3 bit flash ADC. Pictured is a simpler 2 bit ADC. The goal is to one day create a more complex servo controller with analog sensory control. I’ll try and get this flash ADC controlling one servo soon. Verilog is quite flexible in terms of how a project can be designed. This also makes it difficult to decide the best strategy to use.
Down the road, I’d very much like to arrive at a FPGA controlled hexapod biomimetic robot. This already exists, and I could just buy one like this Alchitry project, or even build my own from someone else’s design like this instructable. However, I feel that the biomimicry element is really important to me and these hexapod designs are loosely biomimetic, if at all. The radial symmetry of these common designs probably helps solve problems in the code and hardware, or at least makes conceptualizing the walking gate more straightforward, but insects have three distinct pairs of legs which are different sizes and shapes. Insects have bilateral symmetry only. I think a big part of the graceful leg movements in ants is due to their physical structure. In a way, the leg needs to be built before the brain, but the two work hand in hand, so these projects need to evolve in parallel. This does mean I need to do most of the same leg work other engineers have already done and are offering to share for free. This is specifically an insect biomimetic project, not just a demonstration of FPGA design or mechanical engineering, although I have to do all of the above.
My fantasy is to one day bridge all the threads into one. If I could combine master level craftsmanship in physical construction, high tech digital programming and signal processing, mechatronics and robotic design, and the education and awareness of entomology, I would finish it as soon as possible. Maybe it is possible to at least get the first one made by 2020?