I have created a new PCB I call Sine Control. It is an add-on for my radio control transmitter. It is placed in series with the joystick gimbals so that the radio transmits servo pulses based on the smooth sine wave output of the board. The joysticks control thrust, roll, pitch. and yaw. The Sine Control PCB outputs left and right signals and a phase delayed pair.

Radio Control transmitter, Sine Control PCB from John Espey, and 3D printed wing mechanism.

New PCB in front of an empty board, and my previous THT version.
I learned several lessons from the last PCB run and I greatly improved the circuit design. I compromised and accepted including a dual power supply. This allowed me to use an operational transconductance amplifier, the LM13700 OTA. Now I have an easy way to control amplitude with voltage. I also sourced common components like the MCP6004 and LM324 op-amps so my circuit design wont rely on obsolete parts. The board itself is also a quarter the size of my through hole board from last fall. SMD parts are superior in cost, size, weight, and availability. Also, the smaller boards are cheaper too. I used OSH Park to provide the PCBs.

Schematic of the Sine Control Add-on for a radio control transmitter. The circuit employs op-amps, an LM13700 OTA, and outputs four sine waves.
The circuit design was heavily inspired by audio electronics. The LM13700 OTA is often used as a voltage controlled amplifier (VCA). I used the same sine wave generator from my previous circuit which is the dual integrator with feedback. The thrust and roll input controls are summed or inverted to control the amplitude of the sine wave on the left and right sides of the wing mech. The amplified sine wave output is then level set by the pitch and yaw inputs mixing. This allows me to flap the wing on a gradient of no to large stroke angle. It also allows me to flap the wings forward of the body, or behind it. My theory is that in order to increase thrust, the frequency does not need to change, but the amplitude.
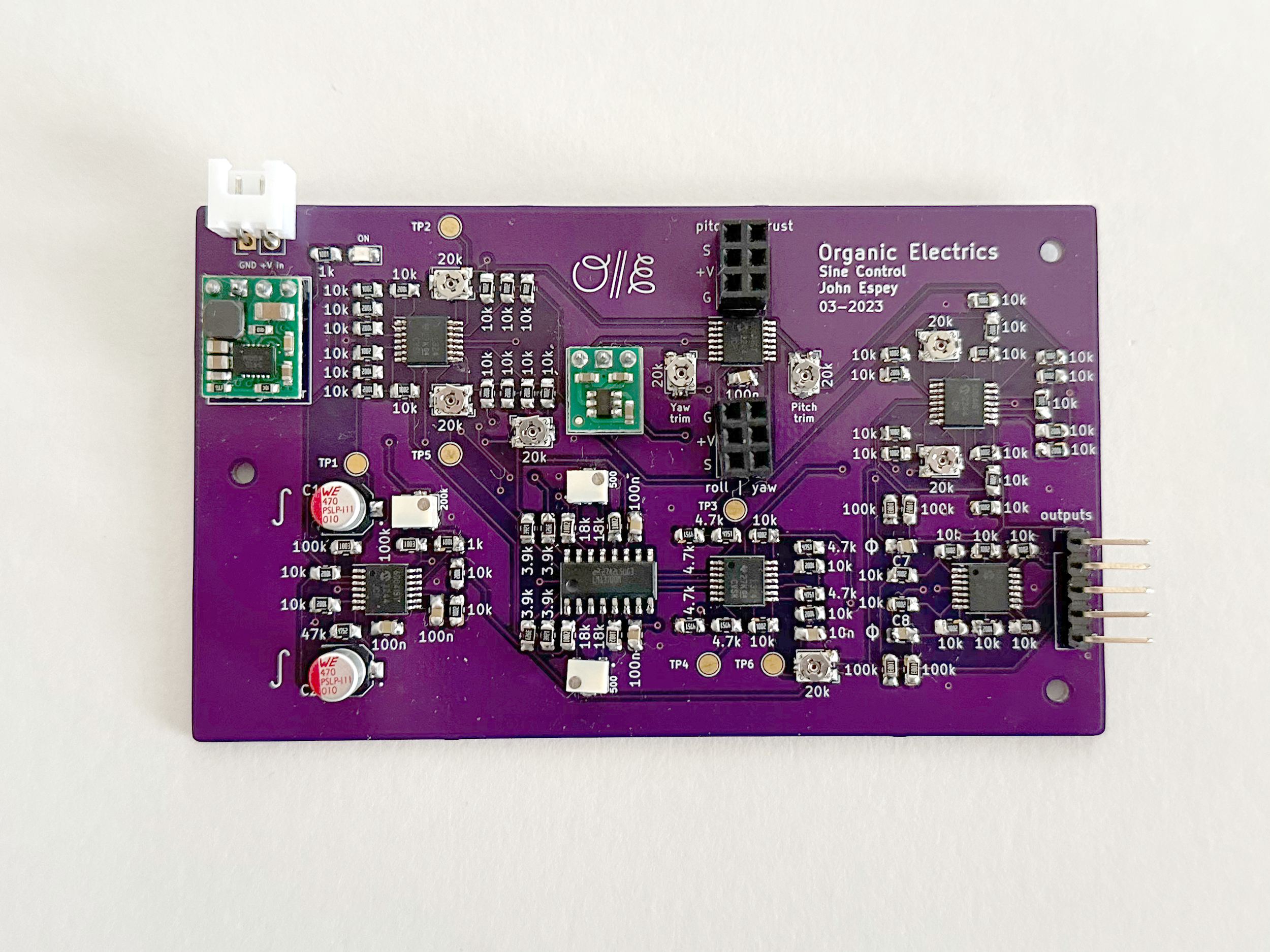
Sine Control PCB. Four inputs control the amplitude and level of inverted sine waves and a phase shifted pair.
Soldering these small SMD components isn’t too difficult. The resistors and capacitors are 0805 packaging, and the op-amps are TSSOP. What I did not anticipate, is the trim potentiometers aren’t cheap. The multi-turn closed trimpots in SMD packaging can be $3-4 each. It doesn’t sound like much, but for something the size of a Tic Tac, and combined with the price of other boards and parts, it adds up quickly. Instead of designing my own power supplies, I purchased two from Pololu. The step-down 5V regulator and the voltage inverter. These are quite small and only provide hundreds of mA of current. Op-amps take very little current and the entire board only draws 10-20mA. I did look to see if I could use the same parts and design my own power supplies. Unfortunately, Digikey and Mouser do not have the chips in stock. Supply chain issues are still impacting component availability. Thankfully these power supplies from Pololu were available!

PCB hacked into the back of my RCTx
Testing and trimming the circuit to output precisely the right voltage is laborious. Next time, I think putting in more effort to avoid excessive trim pots will help cut costs and save time. That is a major consideration in favor of a digital circuit. Digitally, one could just adjust in software and always have a consistent result. However, as I mentioned above, the entire board only draws 10-20mA which is just the operating current of a single micro controller. So we do get great power savings as a MCU would need additional components that would draw even more current.
Demonstration of the Sine Control add-on for a radio control transmitter.
Creating this board represents a major turning point in my craft. I had often wondered if I would ever get to the point where I was designing circuits and building them in SMD sizes. Now, I am here! From this point forward, I can explore even more complex signal circuits, flexible PCBs, custom board shapes, and embedded systems.
What I find so appealing about these signals is that they are a sine wave and my control inputs are all mixed to deliver behaviors instead of managing the positions myself. I followed a roughly video game like control input scheme. The left hand controls position of the body, while the right hand controls perspective of the body.
This flapping mechanism does not fly whatsoever. In order to tackle flight, I will need to greatly improve the weight, and wing designs. It is pretty heavy, and even these beefy servos aren’t that strong when their amplitude is doubled (half the torque) by the gearing of the wing hinge. I’m looking into using light weight PLA in the near future.
Two years ago, I created a detailed 3D model of a honeybee. Since then, I have taken a long detour into analog electronics, sine wave generators, motor controls, mechanism development and wing production. I’d like to close the loop and use this Sine Control circuit in a radio transmitter, and embed the wing mechanism in a realistic foam insect model so I can have a wireless kinetic sculpture of a flapping insect. Butterfly or bee, I haven’t chosen. I’d like to explore the behaviors a bit more, play with it like a toy, and see if a natural performance or use case reveals itself.